

D3P-600-P3 დელტა რობოტი
პროდუქტის მახასიათებელი
დამახასიათებელი
1, სტანდარტული ციკლის დრო 0,5 წმ-ზე ნაკლებია, რაც აკმაყოფილებს თქვენს სწრაფვას მაქსიმალური სიჩქარისა და მინიმალური მოცულობისთვის.
2, ჰუკის სახსრის გაფართოებული დიზაინი ბრუნვის ღერძში, საშუალებას აძლევს რობოტს ადვილად გაუმკლავდეს მაღალი ინტენსივობის განმეორებით მუშაობას.
3, რობოტი იდეალურია ვიწრო სივრცეში ოპერაციებისთვის, ასევე მაღალი სიჩქარით და მაღალი სიზუსტით 3C ველში.ფართოდ გამოიყენება მცირე სამუშაო ნაწილების აწყობაში, დამუშავებასა და ტესტირებაში.
პროდუქტის პარამეტრები
| ტიპი | D3P-600-P3 | |
| ცულები | 3+1 | |
| ტვირთამწეობა | 3 კგ | |
| მანიპულატორი | წონა | 66 კგ |
| დიამეტრი | 600 მმ | |
| განმეორებადობა | თანამდებობა | 0.05 მმ |
| Როტაცია | 0.1° | |
| Მაქსიმალური სიჩქარე | 500pp/წთ | |
| როტაციის დიაპაზონი | ±360 | |
| ინერციის დასაშვები მაქსიმალური მომენტი | 31 × 10-4კგ .მ2 | |
| გააქტიურებული მკლავის კუთხის დიაპაზონი | ზემოთ | 36.5º |
| ქვემოთ | 65.5º | |
| Ენერგიის წყარო | სამფაზიანი 380VAC -10%~+10%, 49~61Hz | |
| სიმძლავრე | 3KVA | |
| რეიტინგული სიმძლავრე | 1.3 კვტ | |
| Შენახვის ტემპერატურა | -10℃~70℃ | |
| Სამუშაო გარემო | -10℃~50℃,RH≤80% | |
| დაცვა | IP55 | |
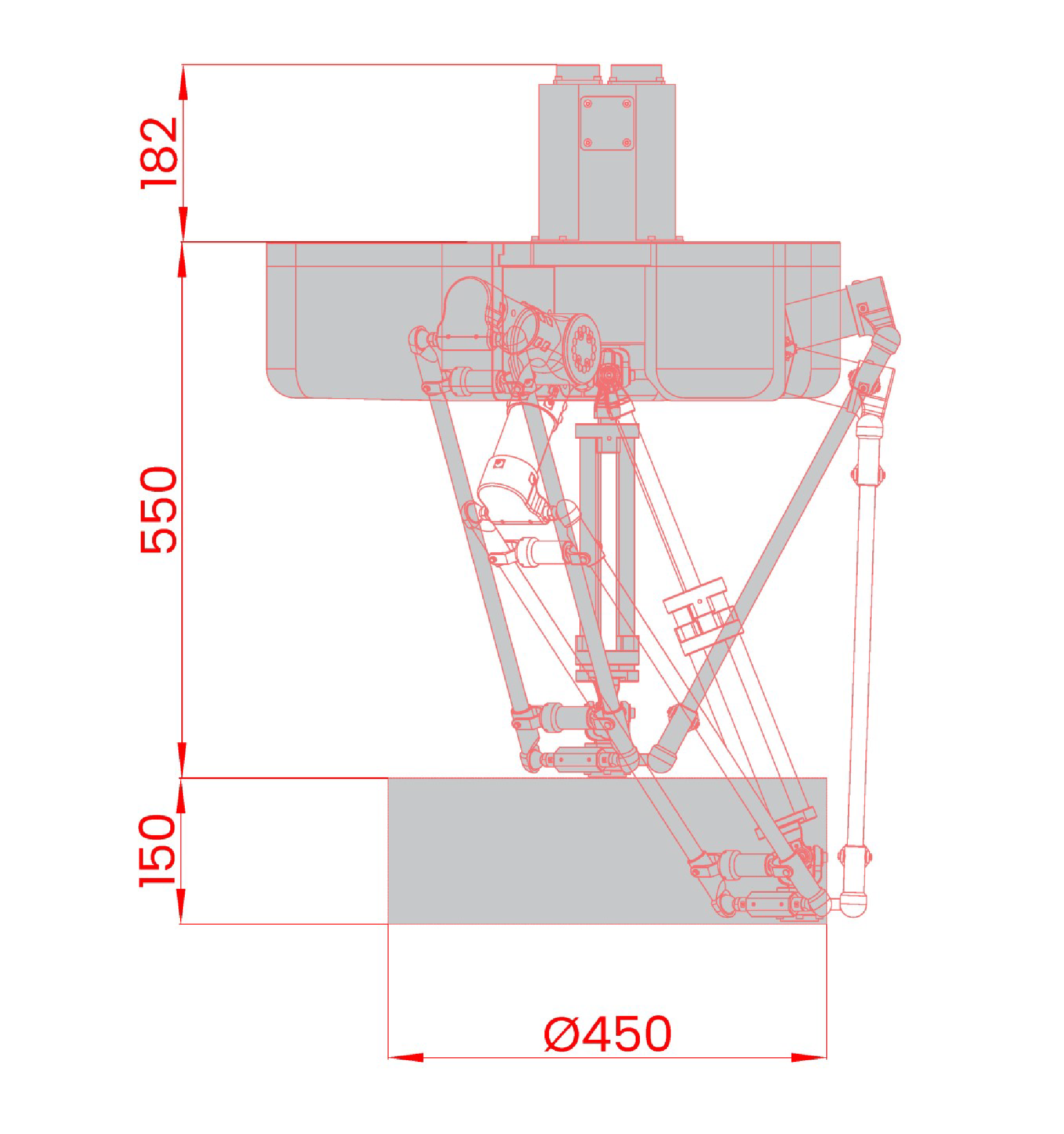
პროდუქტის ნახაზი
01. ზომები და სამუშაო დიაპაზონი (მმ)
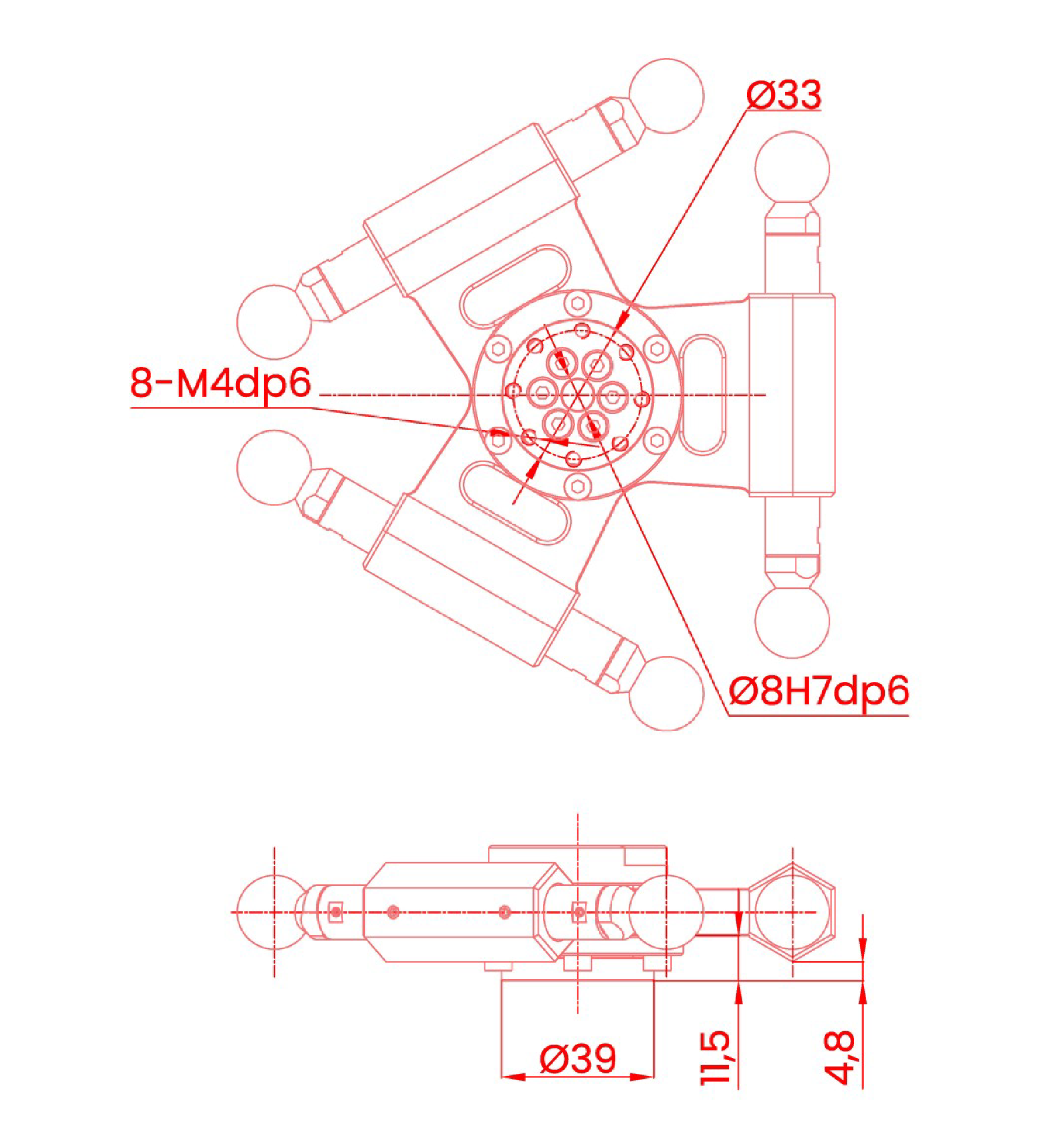
02. ფლანგი (მმ)
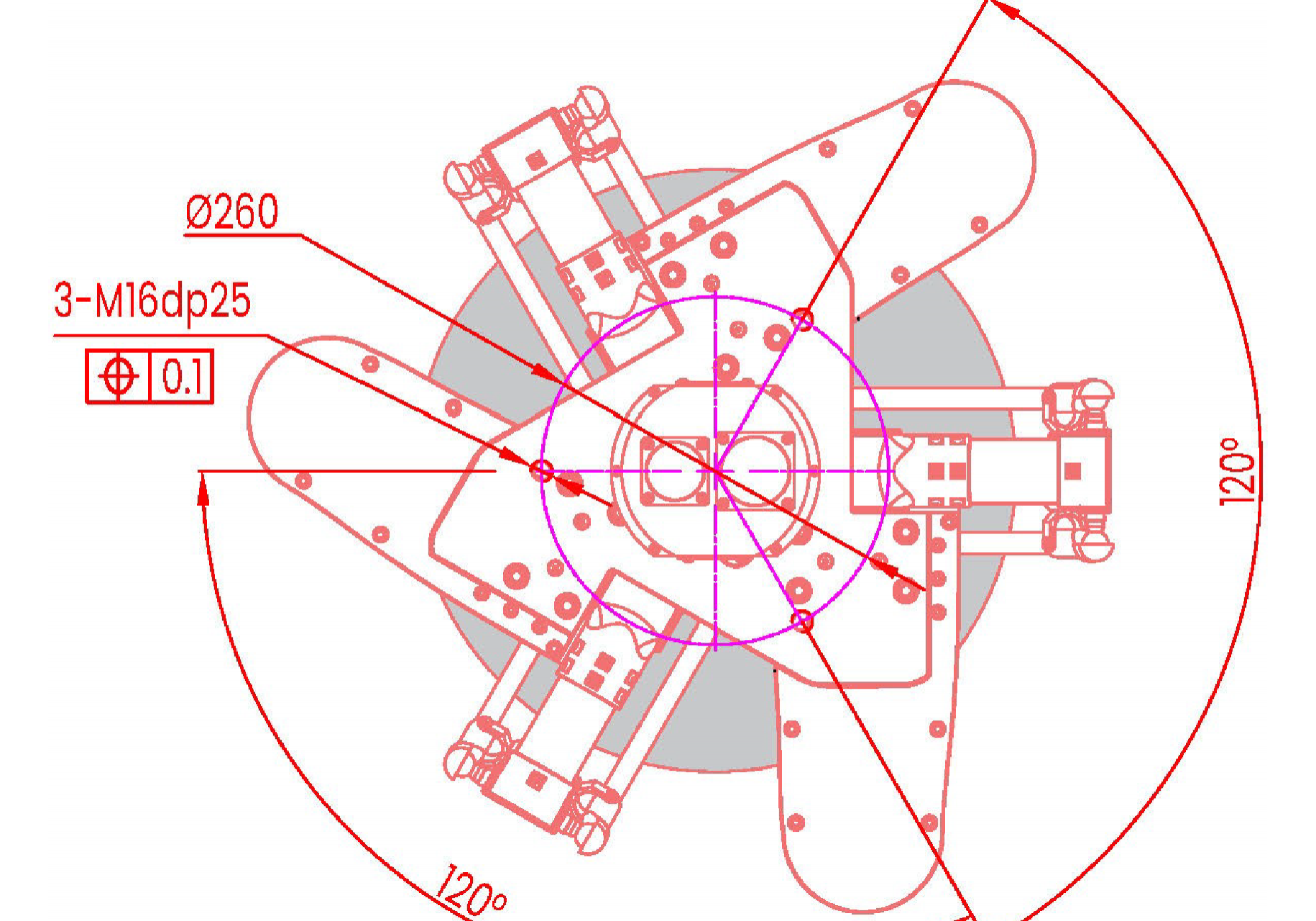
03. ბაზის მონტაჟი (მმ)
დაწერეთ თქვენი მესიჯი აქ და გამოგვიგზავნეთ





